����������
�C(j��)���W(xu��)��(x��)ȫ���{(di��o)�����@��(g��)˼·�ѽ�(j��ng)�^�r(sh��)�ˡ�
�ȸ���X�F(tu��n)�(du��)�l(f��)����һ�(xi��ng)���о���
ֻ����(j��ng)�W(w��ng)�j(lu��)�ܘ�(g��u)�������ľW(w��ng)�j(lu��)����Ӗ(x��n)�������{(di��o)��������ֱ�ӈ�(zh��)���΄�(w��)��
�@�ӵľW(w��ng)�j(lu��)����WANN����(qu��n)�ز���֪��(j��ng)�W(w��ng)�j(lu��)��
����MNIST��(sh��)�ַ���΄�(w��)�ϣ�δ��(j��ng)Ӗ(x��n)���͙�(qu��n)���{(di��o)�������_(d��)����92%�Ĝ�(zh��n)�_�ʣ���Ӗ(x��n)����ľ��Է�������F(xi��n)�ஔ(d��ng)��
���˱O(ji��n)���W(xu��)��(x��)��WANN߀�܄����S����(qi��ng)���W(xu��)��(x��)�΄�(w��)��
�F(tu��n)�(du��)�ɆT֮һ�Ĵ���David Ha���ѳɹ��l(f��)�������أ��ѽ�(j��ng)�@����1300��ٝ��
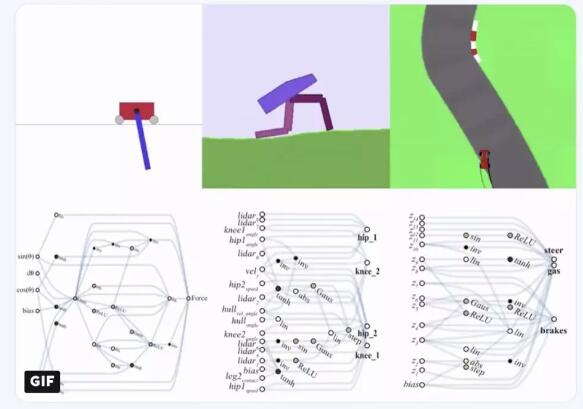
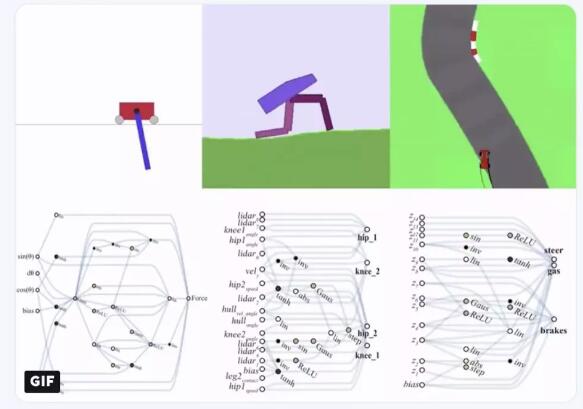
��һ�(xi��ng)�΄�(w��)��Cart-Pole Swing-Up��
�@�ǽ�(j��ng)��Ŀ����΄�(w��)��һ�l��܉��һ�_(t��i)С܇��܇��һ���U�ӡ�
С܇�ڻ�܉�ķ������ܣ�Ҫ�їU�ӏ���Ȼ�´��Ġ�B(t��i)�u�ρ���������ֱ����λ�ò�������
(�@��(g��)�΄�(w��)�Ȇμ���Cart-PoleҪ�yһЩ��
Cart-Pole�U�ӵij�ʼλ�þ�������ֱ��������ҪС܇�����u�ρ���ֻҪ���־Ϳ��ԡ�)
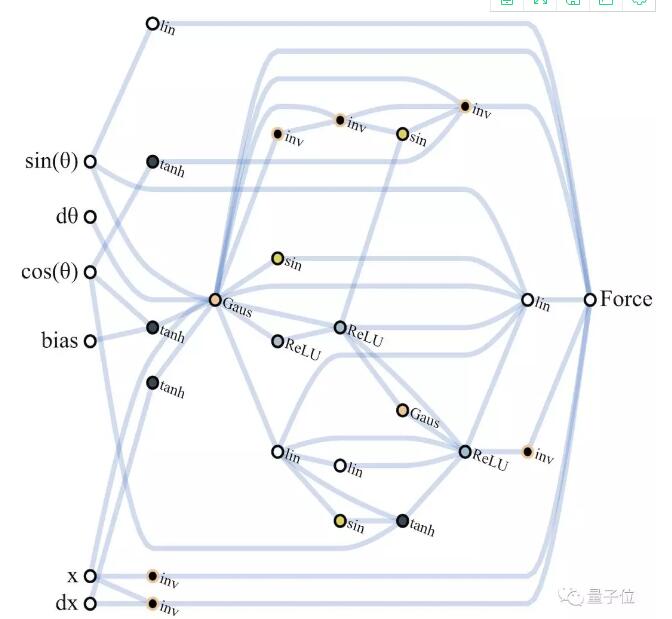
�y���w�F(xi��n)�ڣ��]���k���þ��Կ����� (Linear Controller) ����Q��ÿһ��(g��)�r(sh��)�g���Ī�(ji��ng)��(l��)�����ǻ���С܇����܉һ�^�ľ��x���Լ��U�Ӕ[��(d��ng)�ĽǶȡ�
WANN����ѾW(w��ng)�j(lu��) (Champion Network) �L�@�ӣ�
�ڶ��(xi��ng)�΄�(w��)��Bipedal Waker-v2
һֻ���㡰�����Ҫ���S�C(j��)���ɵĵ�·����ǰ�ߣ�Խ�^�𣬿��^�ݿӡ���(ji��ng)��(l��)���٣��Ϳ����ij��l(f��)��������˶��L��·���Լ�늙C(j��)Ť�صijɱ� (���˹Ą�(l��)��Ч�\(y��n)��(d��ng)) ��
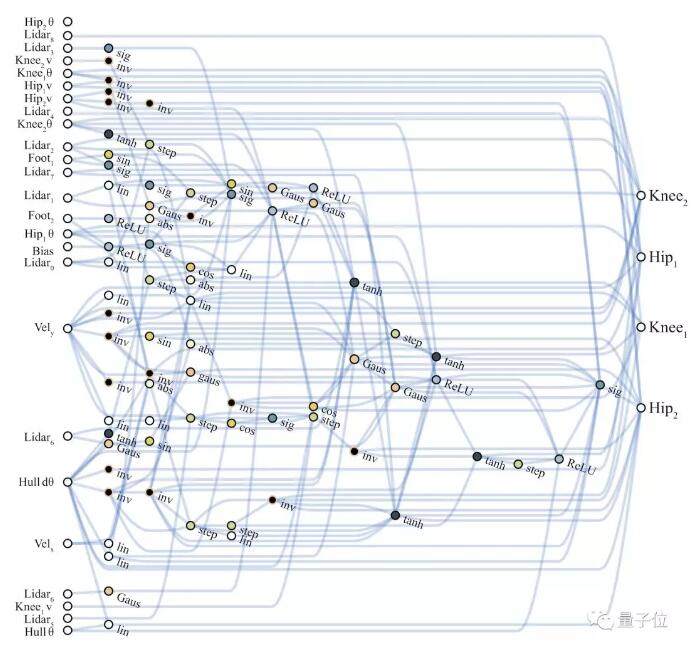
ÿ�l�ȵ��\(y��n)��(d��ng)��������һ��(g��)�y�P(gu��n)��(ji��)����һ��(g��)ϥ�P(gu��n)��(ji��)�����Ƶġ���24��(g��)ݔ�룬��(hu��)ָ��(d��o)�����\(y��n)��(d��ng)���������������_(d��)��̽�y��ǰ�����Δ�(sh��)��(j��)�����w���ܵ����P(gu��n)��(ji��)�\(y��n)��(d��ng)�ٶȵȵȡ�
�����һ�(xi��ng)�΄�(w��)�еĵ;Sݔ�룬�@����ܵľW(w��ng)�j(lu��)�B�Ӿ������ˣ�
���ԣ���ҪWANN����ݔ�뵽ݔ���IJ�����ʽ�������x��
�@��(g��)�߾S�΄�(w��)��WANNҲ��(y��u)�|(zh��)����ˡ�
�㿴���@������������Ѽܘ�(g��u)���Ȅ��ŵĵ;S�΄�(w��)��(f��)�s���S�ࣺ
�����(xi��ng)�΄�(w��)��CarRacing-v0��
�@��һ��(g��)���϶��µ� (Top-Down) �����حh(hu��n)�����ِ܇�Α�
һ�v܇��������(g��)�B�m(x��)��������ƣ����T���D(zhu��n)���Ƅ�(d��ng)��Ŀ��(bi��o)����Ҏ(gu��)���ĕr(sh��)�g���(j��ng)�^�M���ܶ�Ĵu�K��ِ�����S�C(j��)���ɵġ�
�о��ˆT�ѽ��ÿ��(g��)���� (Pixel Interpretation) �Ĺ������o��һ��(g��)�A(y��)Ӗ(x��n)����׃���Ծ��a�� (VAE) �����������ر������s��16��(g��)���ھS�ȡ�
�@16�S���ǾW(w��ng)�j(lu��)ݔ��ľS�ȡ��W(xu��)�����������Á�z�yWANN�W(xu��)��(x��)�����P(gu��n)(li��n) (Abstract Associations) �������������Ǿ��a��ͬݔ��֮�g�@ʽ�Ď��P(gu��n)ϵ��
�@��WANN��ѾW(w��ng)�j(lu��)����-1.4�����(qu��n)���¡�δ��(j��ng)Ӗ(x��n)����ِ܇�ɹ���
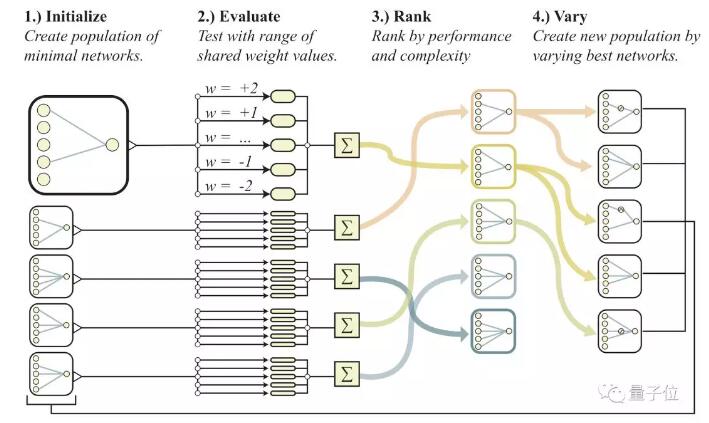
1����(chu��ng)����ʼ����С��(j��ng)�W(w��ng)�j(lu��)��?f��)�Ⱥ�?
2��ͨ�^����(g��)rollout�u��ÿ��(g��)�W(w��ng)�j(lu��)������ÿ��(g��)rollout���䲻ͬ�Ĺ����(qu��n)��ֵ��
3������(j��)���ܺ͏�(f��)�s�̶Ȍ��W(w��ng)�j(lu��)�M(j��n)������
4������(j��)������ߵľW(w��ng)�j(lu��)��?f��)��?chu��ng)���µ�Ⱥ��ͨ�^�����Y(ji��)���M(j��n)�и����Ե��x��
Ȼ���㷨�ĵ�2���_ʼ�؏�(f��)�����B�m(x��)�����У��a(ch��n)����(f��)�s����u���ӵę�(qu��n)�ز���֪��?f��)䣨weight agnostic topologies ����
|